�t�⾀�y������������ԭ��
�t�⾀�y�����������DƬ��
�t�⾀�y������������ԭ����
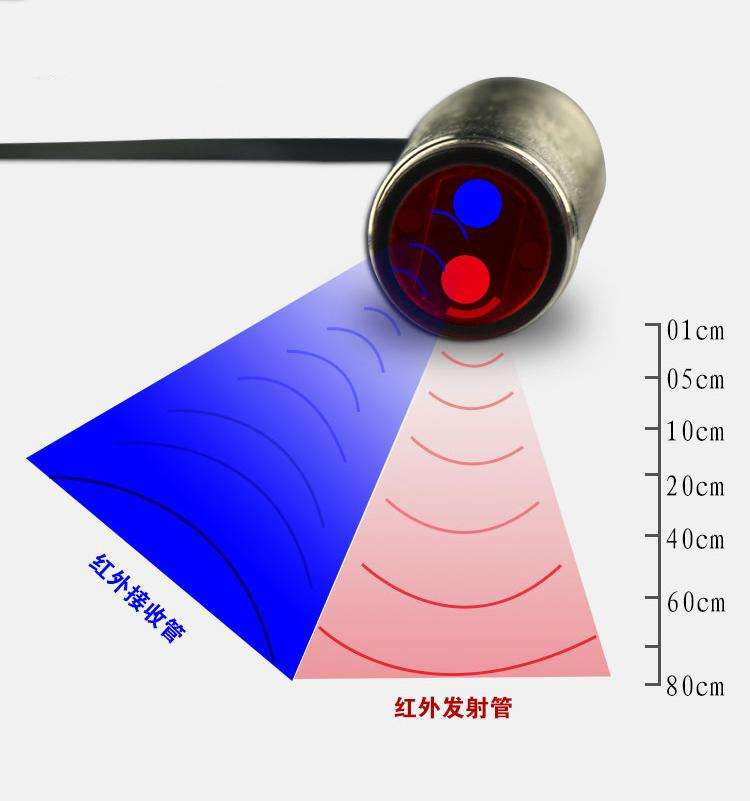
�t��y�����������üt����̖�����ϵK����x�IJ�ͬ����ď���Ҳ��ͬ��ԭ�����M���ϵK���h���ęz�y���t��y������������
һ���t����̖�l���c���ն��O�ܣ��l��ܰl���ض��l�ʵļt����̖�����չܽ����@�N�l�ʵļt����̖�����t��ęz�y��������
�ϵK��r���t����̖����������չܽ��գ����^̎��֮��ͨ�^���ւ������ӿ����ص��C�������C���C���˼������üt���
������̖���R�e�܇��h����׃����
�t��y��ij��÷�����ԭ��
�ٕr�g��y��ԭ��
�ڷ����������y��ԭ��
����λ���y��ԭ��
�����Ƿ��y��ԭ��
�t��l����O�ܵ���Ҫ����
1����������� 2����� 3���t�⾀�������O��
�t��y�����������c
1���h���x�y�����ڟo�����ͷ����ʵ͵���r���ܜy���^�h�ľ��x;
2����ͬ��ݔ��ˣ��ɶ���������ͬ���y��;
3�� �y�������V��푑��r�g��;
�t��y������������
���ځ�ȫ����Ȼ�ĺ��l�l������ڵ��Ĵ��������Ĵ�����ձ����[������Ӱ����������ȫ�������Ξ��y���I���ߎ�����
�O����L�U���@�r�ѾșC���˾Ϳ��ԺܺõĴ���I���߁��Ѿȱ�����Ⱥ�����������ѾșC���˲���ȱ�ٵ��������C�������к�
��N�����������о��мt��y����������
�\����������֪������ͨӍ���������I�����Ȏׂ������������ѾșC���˱�횾߂�ġ��ѾșC���˵�ͨӍ���I������Ҫ�����C
�������õ��\��������֪���������C���˵��\��������֪�����ǽ����ڂ���������Ч�l�]�ϵġ��t����������ѾșC����
�ϵđ����ஔ�����۵Ĺ��ܣ����õļt��y���������l���һ���t��⣬�����䵽���w���γ�һ��������^�̣����䵽������
�������̖��Ȼ�����ÈD��̎�����հl���c���յĕr�g��Ĕ���������̖̎����̎����Ӌ������w�ľ��x���@���H����ʹ����
��Ȼ���棬Ҳ�����ڼӷ���塣�y�����x�h���ܸߵ��l��푑����m���ڐ��ӵĹ��I�h���С�
�C����һֻ�ǽ�����ğ��c���C���������S���������ܵ��£������������R����y����Ѿȹ����r���C���˾Ͱl�]�������
�ã��C���˵Ĺ������ڂ������Ļ��A�ϰlչ�����ģ�����ֻ�����M�Ă��������g���������������ܵęC���ˡ�

���������P�Y�����£�
����׃�l������ԭ��
׃�l������ԓ����O��?
׃�l���ĽӾ�������ע�����
�\���ڴ��������еĝ�ˮ����׃����
��ˮʽ����׃�����ĸ������ܑ��ý�B
|




 һ��������
һ��������