����tedea�y���������ڙC�����ϵđ���
����tedea�y��������ԭ��
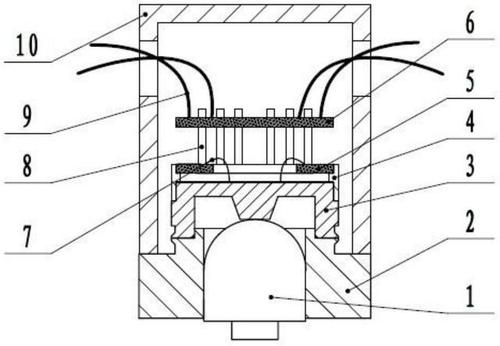
��һ�����������������a����׃�ď����w�����ܸБ��@����׃������葪׃Ƭ�M�ɵ�늘��·�����˹��늘��Լ��ܰ�
��葪׃Ƭ�̶�ճ�N�ڏ����w�ϲ��܂�����׃����ճ�τ��ͱ��o����·���ܷ��z�����ֽM�ɜy����������
��ϵ�ˡ�>>>>>>���
��Ԕ����������V�ݡ��mɪ��ӡ�����˾���������
ϵ���Ԓ��15322063181
����tedea�y�������������Ե�����
Ӱ표y�������������Ե������^�࣬�w�{������Ҫ�У�
1���y���������ĽY��
2������Ԫ���Ľ��ٲ���
3���Cе�ӹ��c��̎����ˇ
4����葪׃Ӌ�c��׃ճ�Y��
5�����칤ˇ����
6���·�a���c�{��
7�����o�c�ܷ�
8��������̎��
����tedea�y�����������P��̖�У�
tedea�y��������1042-3kg
tedea�y��������1042-5kg
tedea�y��������1042-7kg
tedea�y��������1042-10kg
tedea�y��������1042-15kg
tedea�y��������1042-20kg
tedea�y��������1042-30kg
����tedea�y���������ڙC�����ϵđ���
�S�����I���g�İlչ���C���˵đ���Խ��Խ�V�������Ч�Ĺ���Ч�ʣ������������I�����a������Ȼ�����I�C���˲����ܺ�
�õęz�y�����܇��h�������c���I�ăx���Y�ϲ��܌��FijЩ���ܡ��S��Խ��Խ����N��ͬ�Ă��������뵽�C�����ϣ�ʹ�ÙC��
�˸������У��������ܻ����ڴ˺��ν�B�£��y���������ڙC�����е�5�N���ã�
1.����
���������״���������������ڴ�ĥ������ȑ��á������@Щ���ö����y���F�Ԅӻ������C������ҪijЩ���������_����
�Ƅӵ�����
ͨ�^�ڳ�����������������·�����Ժ��p���@Щ���Ì��F�Ԅӻ������F�������̵�һ���ԡ����@�N��r�£�����Ҫʹ��һ
���ⲿ�b�ã������ǙC�����������ṩ��Ƕ��ʽ��Q������
2.Ŀ�˶�λ
���H�����У��ö��Ñ�ͨ���J�飬�㲿����λ�Ͷ�����Ψһ������ʹ��ҕ�X�������������H���@����Ψһ�Ľ�Q���������ɷ�
�J��ҕ�Xϵ�y���㲿����λ�������ĺ÷�ʽ�����������������팤�Һ͙z�y�㲿��Ҳ�ǿ��еġ��_��������X-Yƽ���ϵ�λ����
һ���£��_��������̎�ĸ߶�������һ���¡����H�ϣ�Ҫ�����@һ�c����Ҫһ��3Dҕ�Xϵ�y�������һ�����w���t����Ҫ֪��
�������w�Ĵ_�И�����ֻ��Ҫÿ��ȥ�Ƕ����w���ҾͿ����ˡ��C����ֻ��_���Ƕ����w�ĸ߶ȣ�Ȼ���{����ץȡ�߶ȾͿ�
���ˡ�
��һ�Nʹ���������������������ǂ�������������ģʽ�����@�п�����δ�ܳ�����Üy���������ą�����������ģʽ������������ģ
ʽ���ԡ���š��C���˵��S���@��ʹ���܉�������Ҏ�ԡ����磬�������һ�_���ؙC���ϔQ�oһ��������t���Խ��2���S��
���������غ��ϣ�ͬ�r߀������һ����ץ�����@��ʹ����ȫ���������㲿�������ģ��������~����������ڙC���˵��S�ϡ�
3.�؏���
����Ñ����ڿ��]ʹ�ÙC�������b���΄գ�ϣ���C�����܉�һ����һ���؏�ͬ�ӵ��΄ա�Ȼ�����b���΄պ��y���F�Ԅӻ���ԭ
��֮һ������������Ҫ�����T�M�����z�y��ͨ�^����y�������������Ը��ܵ��b���^����ʩ�ӵ��������C�����ڽo�֙C�b���
�ؕr����Ҫʩ�ӷdz����_�������������@Щ���������דp�ģ�Ҫ����ßo�p�ؽM�b�����_�������y���@���Ǟ�ʲôҪ�O��һ��
�ܵ͵����ֵ���Է�ֹ�����eλ�͓p�ġ�
4.�Q���|��
�ψD�đ����ǰѳ�ɫ���{ɫ�ı�����_��Ȼ�����҂����õķ�ʽ�s���������ɫ�]���κ��Pϵ�����H�ϣ����������������P��
��ɫ������{ɫ������һЩ�����������IJ�ͬ�����������Ԍ������^���_����
�@߀�����څ^���������ƵIJ�ͬ�㲿����Ȼ�����ڬF�������У�֪�����ץ�����Ƿ������_�����w�������w�Ƿ��ѽ����䣬��
�dz��Ў����ģ�����������a�����п��������͵��㡣�����������Ժ����،��F�@һ�c��
5.�ք�����
�օf���C���˶���ͨ�^ʹ�Ã��Üy���������팍�F�ք������ģ������y�Ĺ��I�C���˲��]�Ѓ����@�N��͵Ă��������@��
�Ǟ�ʲô���y���I�C������Ҫһ���y��������������������Ϳ����ք�����ʾ�̙C���ˣ�������Ҫʹ��ʾ������ֻҪһ���y��
���������Ϳ���ͨ�^�O���C���˵����c�ͽK�c���Լ����g�ľ���܉�E����əC���˵�ʾ�̡�
����Ŀǰ�������ģ��������dz����ã����ԑ��õ��ܶͬ�đ����С����Է���һ����Ĺ������̣������Ƿ����ʹ��������
�����ҕ�Xϵ�y���֕r�����������������ɣ�����Ҫ�����̣��Ñ��Լ�������ɡ�
�����������Y�����£�
load cell_�Q������
�͂������ĽY����ԭ��Ԕ����B
÷����.������load cell_�Q������
����������������ԭ�������bע�����
����Celtron�͂������ĽY����ԭ��Ԕ����B
|




 һ��������
һ��������